

I was one of the UX researchers working for the UK Autodrive, a flagship, multi-partner project studying automated vehicles.
It focused on the development of Human Machine Interface (HMI), and performing real-world trials of these technologies in low-speed, short range vehicles. I was working for Jaguar Land Rover, and we were using vehicles manufactured by RDM Group, a.k.a. Aurigo. The project was funded by Innovate UK – an agency to find and drive science and technology innovations.
We conducted dozens of user studies and had more than 500 participants testing self-driving vehicles in diverse types of experiments. We run usability studies testing interfaces, both internal (for occupants of the vehicle) and external (for pedestrians and other vulnerable road users). Research questions involved wether or not specific features increase trust and acceptance of autonomous vehicles.
Internal vehicle HMI
As part of the UK Autodrive project, partners Jaguar Land Rover and RDM/Aurrigo wanted to understand the interaction between occupants of automated vehicles and four types of interfaces. So our team designed a study to evaluate different configurations of screens comparing how they communicated the possible hazards in the environment (e.g. vulnerable road users), and vehicle behaviours (e.g. intended trajectory). These interfaces were presented in a fully automated vehicle tested by 25 participants in an indoor arena.

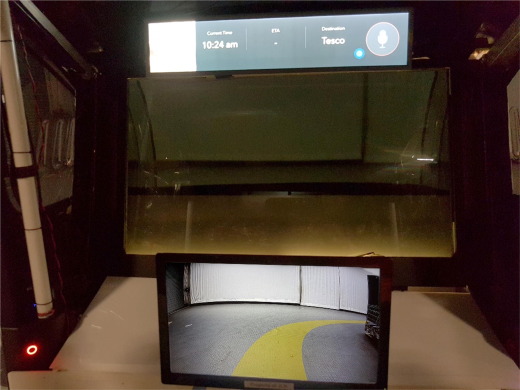

Surveys and interviews measured trust, usability and experience after users were driven by an automated low-speed pod. Participants experienced four types of interfaces, from a simple journey tracker to a windscreen-wide augmented reality (AR) interface which overlays hazards highlighted in the environment and the trajectory of the vehicle.
A combination of the survey and interview data showed a clear preference for the AR windscreen and an animated representation of the environment. The trust in the vehicle featuring these interfaces was significantly higher than pretrial measurements. However, some users questioned if they want to see this information all the time. One additional result was that some users felt motion sick when presented with the more engaging content. We provided recommendations for the design of interfaces with the potential to improve trust and user experience within highly automated vehicles. This study was previously published here: https://doi.org/10.1016/j.trf.2020.06.001
Control interfaces
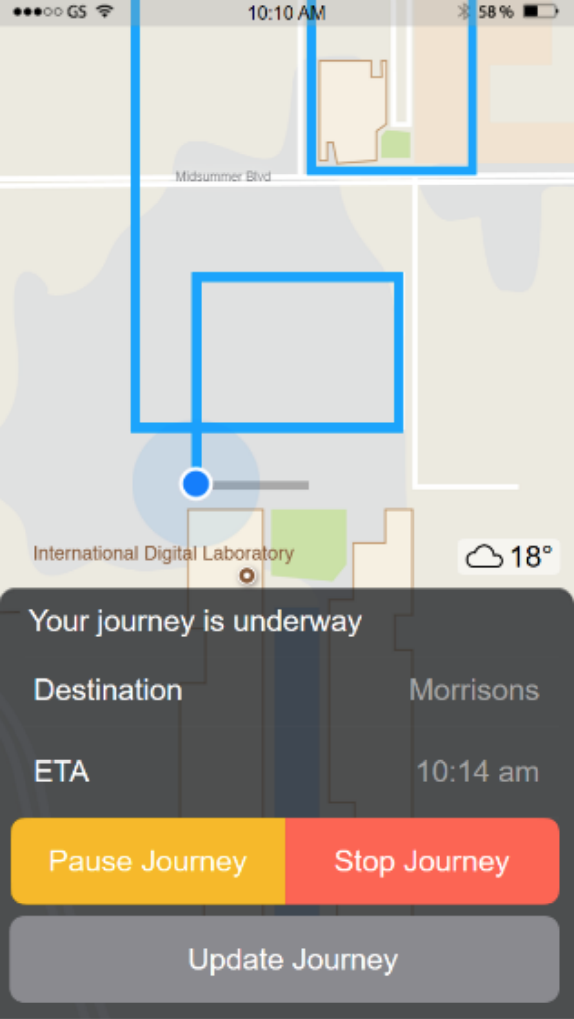
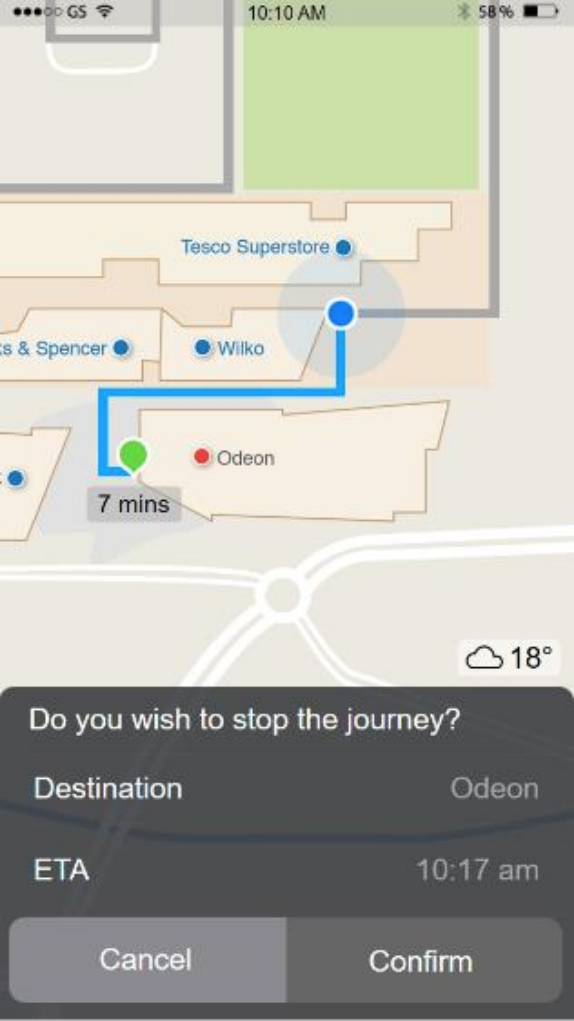
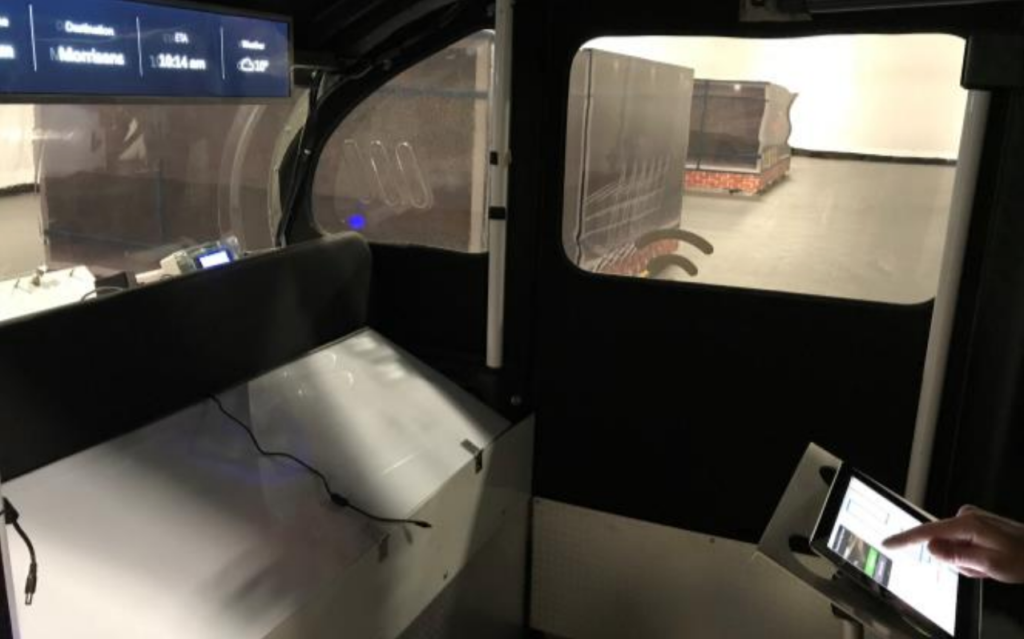
Another example of study include the testing of interfaces for controlling the vehicle, comparing personal smartphones, a tablet-type of interface fixed within the vehicle, and a larger display embedded above the windscreen of the vehicle. This study was published as part of the proceedings of the Automotive Interfaces conference, Auto-UI 2018. It can be seen via the link https://doi.org/10.1145/3239060.3239065.

External vehicle HMI
In another study we examined pedestrian attitudes and road-crossing intentions using these autonomous vehicle in an indoor arena. Two conceptual external human-machine interfaces were presented to display the vehicle’s manoeuvring intentions. One used regular indicators flashing amber LEDs around the wheel wings. The other presented projections on the road to tell exactly where the vehicle was going to turn and to indicate deceleration.

We collected objective measures (via surveys) and critical subjective opinions (via open-ended questions) regarding the interfaces in relation to two specific manoeuvring contexts. These provided insights into pedestrians’ safety concerns towards a vehicle where bi-directional communication with a driver is no longer possible, with suggestions for future vehicle HMI concepts. More information about this study can be found on the respective publication, part of the IEEE conference proceedings: https://doi.org/10.1109/IVS.2019.8814030


Impact
The knowledge produced by the research activities in this project was converted into actionable recommendations for the project partners, notably Jaguar Land Rover. Some of our results were incorporated in the manufacture and system design for the Jaguar I-PACE, the vehicle that is integrated with Waymo’s autonomous driving technology for their robotaxi services currently running in cities like Phoenix, San Francisco, and LA, in the USA.

